After getting my excavator set a few weeks ago and building the models, I started building something I've always wanted to build... A remote controlled mobile arm. After about 2-3 weeks of building and fine tuning I finished. I came up with the name ROTA (Remotely Operated Technic Arm) The programming took an additional day, shortly after I took some videos and put them together so here is the video explaining all the mechanisms:
I am going to split the description into a few sections: Driving Base, the Arm, the Hand, and the Conclusion.
Driving Base
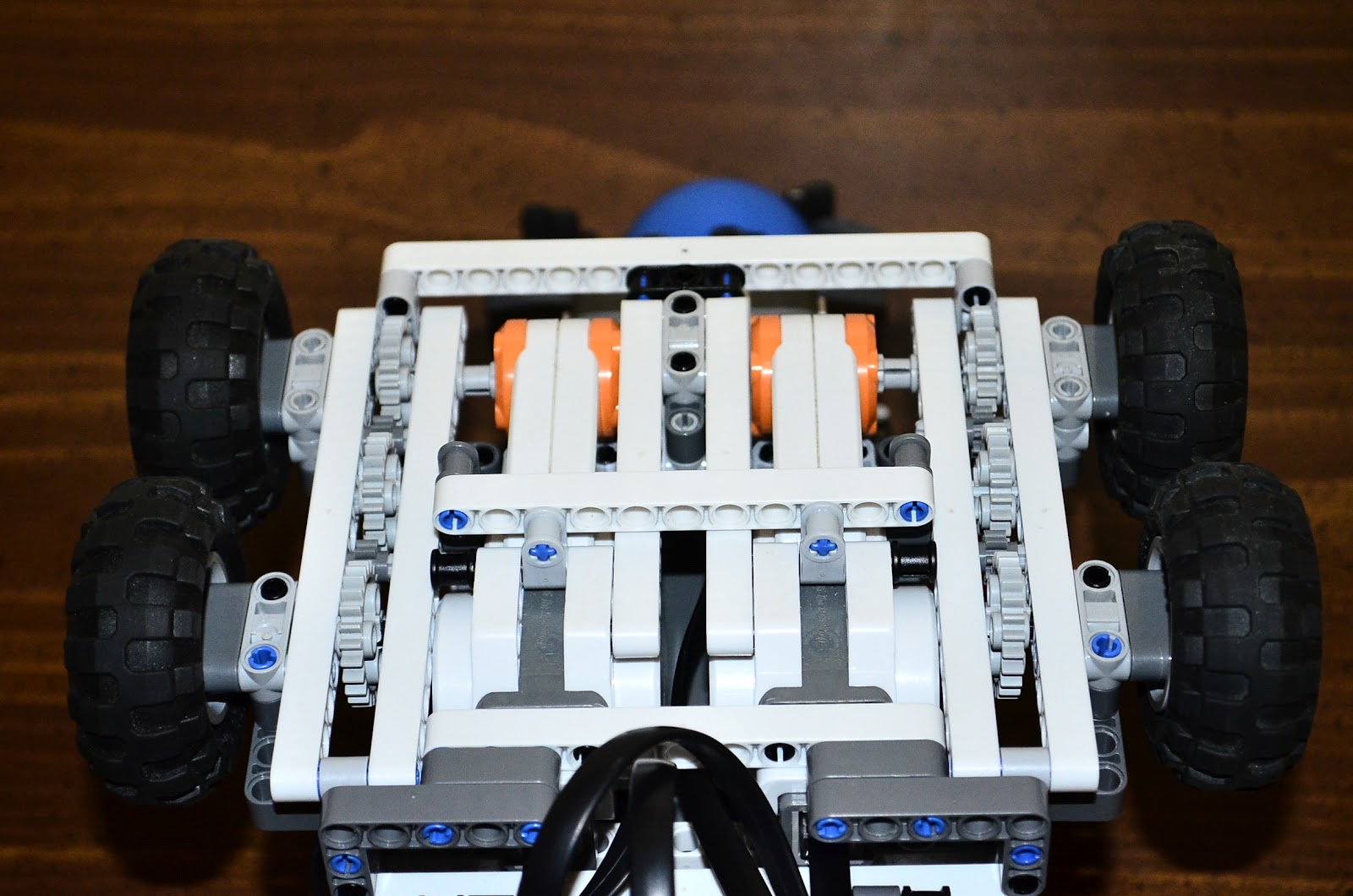
The base is a basic skid-steer base that I strengthened as I built the arm.
The 2 NXT motors are geared down 1:667 and control the driving function. I reinforced the treads due to a slight amount of bending when the arm (weighing around 5 lbs) would try to lift something heavy. The base took the shortest amount of time to build only around 45 minutes with an additional 15-20 minutes fixing all the flaws.
The Arm
The arm was really fun to build but it also gave me the most trouble.
I used 3 linear actuators, two for the whole arm and one for the bend in the middle. You can see the gearing (4th picture) for the two actuators that lift the whole arm. I did not use any gearing for the bend in the middle (5th picture). I originally was going to use two actuators too lift the middle bend but instead I used only one because I needed the other one for the hand. The arm took me about 2-3 hours too build and perfect.
The Hand
The hand also gave me a lot of trouble.
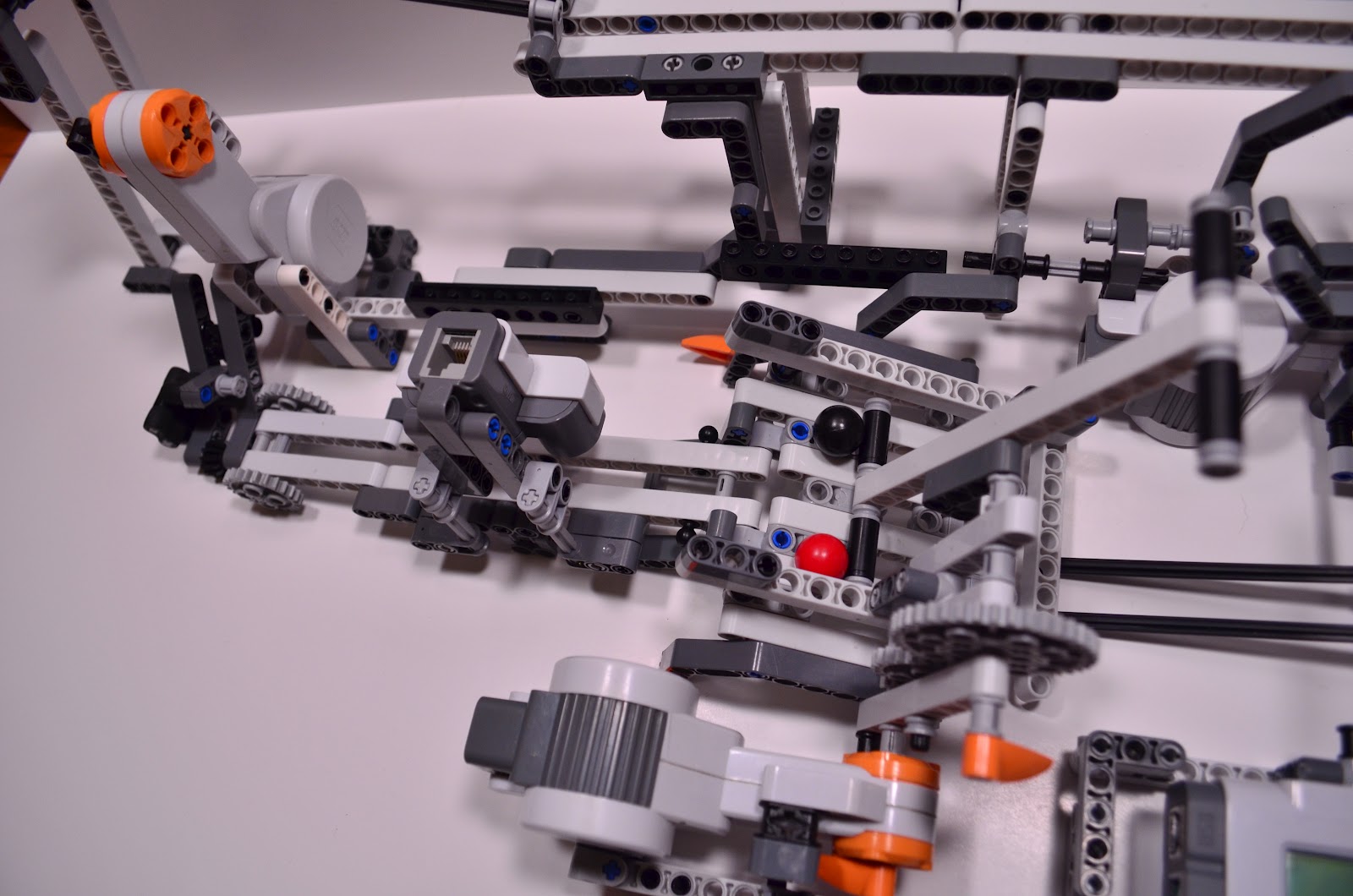
At first I tried using a worm gear for the grabbing function but the worm gear kept on popping off whenever it tried lifting gripping something. So I switched it for the actuator which works like a dream. It also gives it alot more torque when gripping. The hand can spin around by an arrangement of gears that turn a worm gear which turns the turnable connected to the hand.
Conclusion
All in all I really enjoyed building R.O.T.A. I did run into a few challenges though, but I love challenges, they are what keep me going. It is really fun to build with all the parts I got with the excavator. I am planning some more creations and I should be posting more often.
Next Tuesday I will be starting school so I will not be quite busy but since I got the 8043 excavator :D I will be coming out with some bigger and better robots! I am also finishing up with my website so that should be out soon... Also there is some changes that I am making to this blog that me and Ryan (Aka: idkwhoyouare) are working on. So stay tuned I am planning a few big projects but they won't be ready for a couple weeks... If you want to see some videos of the excavator and B-model just visit my Youtube channel: http://www.youtube.com/user/nxtstep101
Here is my robotic Math Game that I made for a school project back in June. Basically it is a game that you can play with 2-6 players, the object of the game is to be the first one around the track and beat the other players. The was you play is you press the Orange button and figure out the answer, then you press it again and click the A,B,C, or D button based on what your answer is. Then you move the spaces the Remote tells you to. If you get the answer wrong you go back the number of spaces the robot tells you to. There are three different objects to cross or go around they are The short cut going forwards, the shortcut going backwards, and the Ferris wheel.
The Ferris Wheel is a creative way to keep interest in the game and keep the learning aspect. The Ferris Wheel is geared down so it rotates slower and smoother. It has 6 seats for the players that are big enough for the tokens!
The track is just spaces to move and place your token there is about 40 spaces is the whole track with the addition of the Ferris Wheel. The Shortcut is a belt that is you land on the space that opens up, you will move either forwards or backwards depending on which side you land on.
Yaaaaaay..... After having to do school into the summer, I have officially finished! Which means I will be working on some new projects (I am testing out some now), although I won't be able to make all of them until I get some much needed parts. I also am going to work really hard to finish my website, and remember what I said about something happening to this blog? Well those changes should take place this summer. So yeah I got a pretty busy summer planned. Oh and by the way something else exciting has happened and you will find out what it is probably by the middle of July.
P.S. I am really trying to find a name for my website and if you think of one either email me: (nxtgeek@gmail.com) or comment. Thanks!
I am testing some different multiplexer mechanisms for one of my future projects (it's really cool) and so here is what I came up with. It needs some improvements but it is just a design, the one I will use for my project is going to be smaller and more accurate, anyway here is the video of it in action:
This is my entry into the unofficial NXTLog Mobile Arm Building challenge that me and a couple of other NXTLogger's started. It wasn't as big as I would have liked it to be but due to the amount of parts I have I couldn't make it bigger. Basically it is a moving arm that can drive with two motors and lift and grab with the other giving it an extra dof (degree of freedom). The chassis (pictured below) was built strong to support the skid-steer drive which if not built properly would have bent the axles.
The grabber/lifting mechanism (pictured below) was designed to first grab something then lift it a few inches off the ground. I geared the lifting mechanism down so that it could pick up heavier (approx. 1.5lbs) objects.
I could probably explain how this works in a lot more detail but that is why I made the video. Enjoy!
Stay tuned for some awesome projects coming this summer!
Yes... I arrived at my new home last Thursday and had to unpack and everthing so I have been busy. But I will still be busy for a few more weeks because I have to do school into some of the summer because of the move, but I will have some cool projects coming up hopefully coming up this summer. Also me and my sister have decided to do a little brick-filming this summer. Well I probably won't be able to post or work on any creations (except for the one I have almost finished) until after I finish school.
Here is a quick video of testing out our walking mechanism for our videos. Check out our channel!
Awhile ago Xander over at BotBenchposted about Minute Bot a base for the Mindstorm NXT (just like a base for regular LEGO's only for the NXT) I thought that it was something like NXTprograms Five Minute Bot so I never actually read the whole article until recently when someone over at Minute Bot emailed me asking me if I would consider posting their short story about their product on my blog. Here is what they emailed me:
Why is it worth going further?
LEGO is a lot of fun. It became so popular almost anyone knows them. As the brand is developing, LEGO bricks have found a new application in the world of prototypes and science. The recent case of LEGO robots building bones serves as the best example. This creates a need for more durable parts, and more stable constructions.
MinuteBot is a concept of semi-professional robotics made easy. The initial idea is to be able to build a robot within a minute. The broader vision is to develop various elements fully compatible with LEGO but far more durable. Parts are made of industrial components with a strong focus on quality of the design and accuracies of all dimensions. MinuteBot has now two projects: Base and Bearing.
Base is a robust base plate of dimensions 240 x 168 mm, and almost a centimeter thick. It differs from a regular LEGO plate significantly. For starters, instead of studs, the plate has holes, just as if it was supposed to go on top of a LEGO bricks. Secondly, being 8mm thick it is much stiffer, allowing for stable constructions. The product is in its development phase, and thanks to the involvement of LEGO fans, MinuteBot is constantly rethinking the design adding other functionalities.
Funds and support for MinuteBot Base are being collected through crowd sourcing. This project is time limited, and it’s facing the tipping point. Support is crucial to allow for base plate to go into mass production. The design and its possible use may be seen at: http://www.kickstarter.com/projects/37801615/minutebot-base
The other project - MinuteBot Bearing is a real-deal heavy duty steel bearing that can take a load much bigger than a standard LEGO solution. A metal bearing is hidden in a LEGO compatible casing allowing for connecting in two planes. Another feature is its toothed edge which makes it a perfect gearwheel. To earn its way to the market MinuteBot Bearing competes against other creations in a Boca Bearing contest. To view the project and help its way through go to:
MinuteBot is facing a challenge of reaching all LEGO builders that would want to extend their designs by features of these parts. It is the fun of creating, and reliability of the construction that is on stake here.
It looks pretty cool! I just can't beleive LEGO never thought of this. Here is there website: http://www.minutebot.com/ they also have a challenge running where you can win some minutebot bases here: http://www.kickstarter.com/projects/37801615/minutebot-base/posts/217507. I was hoping they would give some details in regards to the price and how big and how small they will make the base, but I will definitely be getting some of these when they come out.
After about a day or two of building (approx. 4-5 hrs.) I finished my entry into the unoffical NXTLog car building challenge! The gear ratio of the driving mechanism is 1:1 I originally planned for the ratio to be 1:5 but that was way to fast and it couldn't go over rougher terrain that well.The steering is pretty much the same as HumvNXT but it has been improved. Their are also some realistic features such as a working steering wheel, a gas pedal and a spare tire on the back. It uses no sensors so it is controlled via another NXT. You can see some more photos and download the programs HERE.
Here is a short video a made of The Desert Offroader:
I wouldn't consider this one of my best projects but I still think it is pretty cool!
I have redesigned my blog and was wondering what you think of it? I thought that plain black was sort of dull so I changed it to this! You can vote in the poll or comment! I am working on my entry into the NXT Car Building Challenge and should be posted in about a week.
Update: I have decided to change the changes back because after looking at it again I have to admit it looked pretty bad!
After about 3-4 hours of building and and taking photos and another 30 minutes or so producing the video I present to you! "The Circulator" Building Instructions! So now you can build your very own gbc out of one NXT 1.0 kit and a 2.0 kit if you have extra gears and technic parts!
A few weeks ago I got the Tetrix Education Base Set sold by Lego Education that is compatible with the NXT for my birthday! It is like a Mindstorm NXT on steroids! All parts are made out of aircraft grade aluminum (a strong lightweight metal) their is four motors and a ton of parts, it all hooks up to the NXT the controller. I will be posting some of the projects that I make with my Tetrix/Mindstorm on my blog, Although I won't be posting any projects this week because of a broken charger which should arrive sometimes next week.
Okay so my GBC "The Circulator" that I built got featured on the NXT Step(xD) and the blog editor asked me if I was going to make building instructions, I decided I would so I commented back and told him I would have them up in a couple of weeks. So as of right know I am putting the circulator back together from just the pictures I took and am aiming to finish building it by tommorow and hope to have the instructions done sometime next week!
I have some awesome projects planned and am going to make them soon! So stay tuned for the next couple of weeks!
I was just wondering if anyone knew of a good RobotC tutorial that I could use? (I need it for programming Tetrix) Also how hard is it to learn the language?
I have finally finished my MOC! Presenting......... "The Circulator"
When I heard NXTLog was hosting a "crazycontraption" contest I couldn't wait to get started on an entry, but I only had one NXT set so I couldn't make a really big robot, but I started anyway and it turned out great. Okay now on too the details!
Overview picture.
Module 1: When the ball comes down the ramp it falls in between two technic beam liftarms with a 53 degree angle and will spin 90 degrees every 3.5 seconds. Then after 7 seconds it will be pushed of onto a ramp that goes to the next module.
Module 2: This one is based on a popular GBC module. A motor geared down moves a beam with axles through the end in circles to push balls up a 45 degree angle, which pushes them onto another ramp that leads to the last module.
Module 3: This last module is one of the most common modules, all it does is wait until the ultrasonic sensor sees something pass by and waits 1 second to lift the arm up to start the chain all over again.
Conclusion: This has really been a fun project for me to build, and I hope to build an even bigger one when I get my 2.0!
Here is a bird's eye view of "The Circulator"
Video: You know the saying "a picture is worth 1,000 words Well I say this video is worth 10,000 words :P
My next project is a GBC which stands for "Great Ball Contraption" that I will enter into NXTLogs "crazy contraption" challenge. I have seen many different versions of the GBC some super BIG and some supersmall but I wanted to make one using only one NXT set that could go constantly go around without me feeding it any balls. I am not quite finished yet but should be finished in about a week. I it will only have three modules (because I only have three motors) and is about 2 feet long. In other news my sister got a DSLR camera so she can get some HQ photos of all my robots that make!
Have you ever worked on a robot for a long time and then got discouraged and everything seems to go wrong? Well if you have you know how I feel. I have been working on a project that I have kept top secret for about a month. I have finished building it but it seems that whenever I program it, it messes up in one way or another so I have decided to take a break from programming and work on my project that I will be entering into NXTLogs challenge. But don't worry I made building instructions for my robot and I still have the program so I can still finish it after awhile. This is what I do if I am stumped on an Algebra problem I just skip it and come back to it later. I will be uploading some pics of it in a week or so, so that you know what I was working on.
I have been programming my MOC but I have come up against so many obstacles that I decided to work on the glitches I had in the structure, I finished fixing those yesterday, and today I should be able to get back into programming my MOC. I am hoping to have it finished around March 15-20.
Ever since I got my parts I have been programming like crazy, but today after finishing about 40% of my program I tried it out and it wouldn't work right. Now I am going to have to go back over to see what the problem is, I think it has something to do with one of my gears slipping and not turning the right amount of degrees. Like I said before I should hopefully have it done sometime near the beginning of March.
I have been waiting for a little more than a week now for my parts and they have finally arrived! While I was waiting I was working on a couple of glitches and improvements, Let the programming commence. I should have my MOC finished sometime in the beggining of March. Let the programming commence!







.jpg)