I have finally finished my MOC! Presenting......... "The Circulator"
When I heard NXTLog was hosting a "crazycontraption" contest I couldn't wait to get started on an entry, but I only had one NXT set so I couldn't make a really big robot, but I started anyway and it turned out great. Okay now on too the details!
Overview picture.
Module 1: When the ball comes down the ramp it falls in between two technic beam liftarms with a 53 degree angle and will spin 90 degrees every 3.5 seconds. Then after 7 seconds it will be pushed of onto a ramp that goes to the next module.
Module 2: This one is based on a popular GBC module. A motor geared down moves a beam with axles through the end in circles to push balls up a 45 degree angle, which pushes them onto another ramp that leads to the last module.
Module 3: This last module is one of the most common modules, all it does is wait until the ultrasonic sensor sees something pass by and waits 1 second to lift the arm up to start the chain all over again.
Conclusion: This has really been a fun project for me to build, and I hope to build an even bigger one when I get my 2.0!
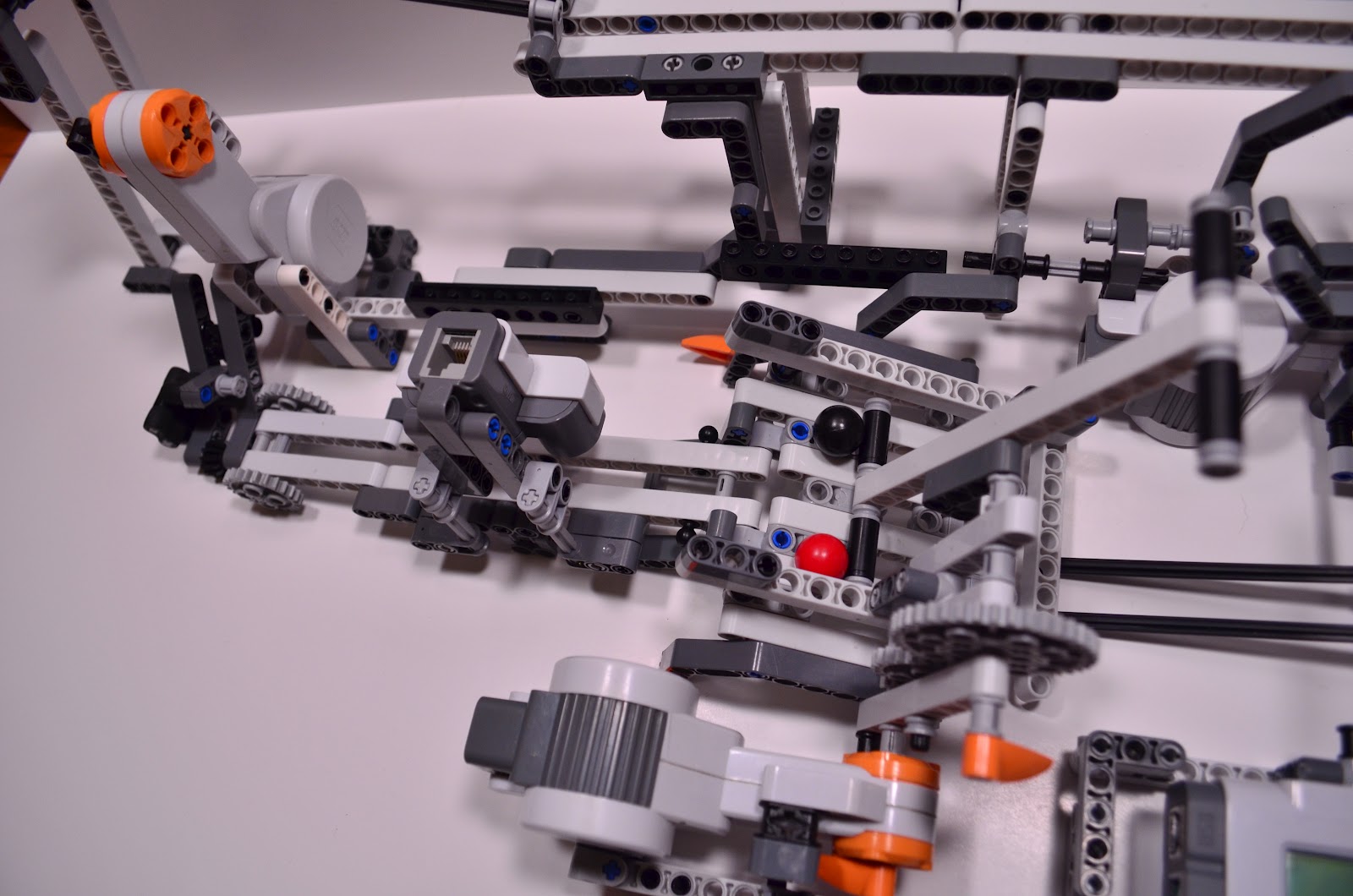
Here is a bird's eye view of "The Circulator"
Video: You know the saying "a picture is worth 1,000 words Well I say this video is worth 10,000 words :P
David Gilday is in the process of making a website for his NXT rubiks cube solver: "Mindcuber" He has made building instructions and video which you can see on his new website: http://www.mindcuber.com/
Here is one of the videos:
MOC update: I am working on the video and should have it all posted in a few days!
My next project is a GBC which stands for "Great Ball Contraption" that I will enter into NXTLogs "crazy contraption" challenge. I have seen many different versions of the GBC some super BIG and some supersmall but I wanted to make one using only one NXT set that could go constantly go around without me feeding it any balls. I am not quite finished yet but should be finished in about a week. I it will only have three modules (because I only have three motors) and is about 2 feet long. In other news my sister got a DSLR camera so she can get some HQ photos of all my robots that make!
Have you ever worked on a robot for a long time and then got discouraged and everything seems to go wrong? Well if you have you know how I feel. I have been working on a project that I have kept top secret for about a month. I have finished building it but it seems that whenever I program it, it messes up in one way or another so I have decided to take a break from programming and work on my project that I will be entering into NXTLogs challenge. But don't worry I made building instructions for my robot and I still have the program so I can still finish it after awhile. This is what I do if I am stumped on an Algebra problem I just skip it and come back to it later. I will be uploading some pics of it in a week or so, so that you know what I was working on.
I have been programming my MOC but I have come up against so many obstacles that I decided to work on the glitches I had in the structure, I finished fixing those yesterday, and today I should be able to get back into programming my MOC. I am hoping to have it finished around March 15-20.