Anyways you have seen a short list of the Highlights, some Future Plans, and some of our Favorite Projects! Now we from the NXT Geeks blog wish you a happy New Year!
After getting my excavator set a few weeks ago and building the models, I started building something I've always wanted to build... A remote controlled mobile arm. After about 2-3 weeks of building and fine tuning I finished. I came up with the name ROTA (Remotely Operated Technic Arm) The programming took an additional day, shortly after I took some videos and put them together so here is the video explaining all the mechanisms:
I am going to split the description into a few sections: Driving Base, the Arm, the Hand, and the Conclusion.
Driving Base
The base is a basic skid-steer base that I strengthened as I built the arm.
The 2 NXT motors are geared down 1:667 and control the driving function. I reinforced the treads due to a slight amount of bending when the arm (weighing around 5 lbs) would try to lift something heavy. The base took the shortest amount of time to build only around 45 minutes with an additional 15-20 minutes fixing all the flaws.
The Arm
The arm was really fun to build but it also gave me the most trouble.
I used 3 linear actuators, two for the whole arm and one for the bend in the middle. You can see the gearing (4th picture) for the two actuators that lift the whole arm. I did not use any gearing for the bend in the middle (5th picture). I originally was going to use two actuators too lift the middle bend but instead I used only one because I needed the other one for the hand. The arm took me about 2-3 hours too build and perfect.
The Hand
The hand also gave me a lot of trouble.
At first I tried using a worm gear for the grabbing function but the worm gear kept on popping off whenever it tried lifting gripping something. So I switched it for the actuator which works like a dream. It also gives it alot more torque when gripping. The hand can spin around by an arrangement of gears that turn a worm gear which turns the turnable connected to the hand.
Conclusion
All in all I really enjoyed building R.O.T.A. I did run into a few challenges though, but I love challenges, they are what keep me going. It is really fun to build with all the parts I got with the excavator. I am planning some more creations and I should be posting more often.
I am testing some car designs and Suspension so I made a Porsche 911. Over all the suspension and other test features worked out nicely with a top speed of 244 RPM (MAX.) it works good. It uses 700-1000 parts from the Super car and NXT kits. It is a fast chassis (1:2) with a light weight frame, the heaviest parts of this model are the NXT, Servo motors, PF battery box, and the PF M motor.
The main picture of the Chassis, you can see the ionic Porsche headlights.
A picture of the side, you can see the angle of the back.
You can see the steering system, on the left you can see the clutch gear with a M motor spinning it.
The main drive, One motor spins forwards the other spins backwards. The small black gear on the far left is where it is geared to (1:2)
This is my video, the best parts are from about 0:00-1:00 then the rest is driving and suspension.
It has been one year since the start of this blog and ALOT has happened since then! Here are the most significant events that have happened since I started:
February 2012 - Name changed to NXT Geek
June 2012 - I became a beta tester for Mindsensors
May 2012 - I moved
August 2012 - Ryan became a contributor to the blog
Hello, these are the results for the Trial Truck Competition that me and Nxtstep101 competed against each other in. We have the two videos that have the entries for the competition on (towards the bottom.) Over-all it seems like Nxtstep101's won in speed but mine won in design and features. A little about the competition, we had a course of 8 days to make our models and finish them, we had to use only M motors and no more then 4 in the process and we had to try to make the models resembling a trial truck. Although Nxtstep101 did make a Tank I didn't care too much it was just for fun after all.
The Unimog U500
Here is my entry into the competition, it uses four motors (two for driving, one for the turret, and one for the steering.) It also has a gear ratio of 1:24 which was a little overload but I thought it was needed for the use of M motors.
All Terrain Tank
Here is Michael's Tank, it uses 2 M motors (one for the right treads and the other for the left treads.) It has a gear ratio of 3:5 which as for as I could see worked well with the small chassis and lightweight construction.
As you can see we had very different entries but overall I think they both worked out nicely. Thanks for reading and if you have any Questions or Comments just ask them in the comments.
The MINDSTORMS team has decided to start the MINDSTORMS newsletter up again, so they put together a short 9-question survey to see what all of us fans would like to see in the survey. Go and take a few minutes to answer the question. Here is the link:
https://www.surveymonkey.com/s/LMSnewsletter
Here is the disclaimer:
Disclaimer: all information collected will be aggregated and used anonymously. No additional data other than your answers will be collected. LEGO will not sell or distribute collected information beyond the immediate purpose for which it was solicited. You will not receive any emails or other direct communication as a result of taking this survey. In order to effectively use the data collected, please answer the survey only once, but feel free to let your friends know about the survey.
Next Tuesday I will be starting school so I will not be quite busy but since I got the 8043 excavator :D I will be coming out with some bigger and better robots! I am also finishing up with my website so that should be out soon... Also there is some changes that I am making to this blog that me and Ryan (Aka: idkwhoyouare) are working on. So stay tuned I am planning a few big projects but they won't be ready for a couple weeks... If you want to see some videos of the excavator and B-model just visit my Youtube channel: http://www.youtube.com/user/nxtstep101
Here is my robotic Math Game that I made for a school project back in June. Basically it is a game that you can play with 2-6 players, the object of the game is to be the first one around the track and beat the other players. The was you play is you press the Orange button and figure out the answer, then you press it again and click the A,B,C, or D button based on what your answer is. Then you move the spaces the Remote tells you to. If you get the answer wrong you go back the number of spaces the robot tells you to. There are three different objects to cross or go around they are The short cut going forwards, the shortcut going backwards, and the Ferris wheel.
The Ferris Wheel is a creative way to keep interest in the game and keep the learning aspect. The Ferris Wheel is geared down so it rotates slower and smoother. It has 6 seats for the players that are big enough for the tokens!
The track is just spaces to move and place your token there is about 40 spaces is the whole track with the addition of the Ferris Wheel. The Shortcut is a belt that is you land on the space that opens up, you will move either forwards or backwards depending on which side you land on.
Hey everyone sorry for not posting in awhile I have just been busy, But anyways I wan't you to meet my new contributor his name is Ryan (a.k.a idkwhoyouare) I have followed his creations on NXTLog for as long as he has been on. He is a very talented builder, he specializes in bigger robots rather then smaller (He has two NXT's plus a few Technic sets). He has built alot of robots but he personally thinks that his "Lightning McQueen" was his best! Anyway he will be posting here for and keeping this blog up and running while I am working on my website and learning labview. He is currently working on making a model of J5 (Johnny Five).
Hey everyone I hope everyone's summer has been going well!
Anyway I just wanted to let you know that the big changes I talked about are still going to happen just not right now I have to finish up some details. My website is coming along slowly but surely it should be ready by the end of summer :D Some of my big projects I had planned are going to be postponed until I get the 8043 Excavator (I should have enough money by the end of this month xD) because I need some more parts. One of my previous POST's might have seemed sort of in uninformative or quick but it wasn't (You will understand soon enough :D).
Well I just wanted to let you know what was going on.
Yaaaaaay..... After having to do school into the summer, I have officially finished! Which means I will be working on some new projects (I am testing out some now), although I won't be able to make all of them until I get some much needed parts. I also am going to work really hard to finish my website, and remember what I said about something happening to this blog? Well those changes should take place this summer. So yeah I got a pretty busy summer planned. Oh and by the way something else exciting has happened and you will find out what it is probably by the middle of July.
P.S. I am really trying to find a name for my website and if you think of one either email me: (nxtgeek@gmail.com) or comment. Thanks!
I am testing some different multiplexer mechanisms for one of my future projects (it's really cool) and so here is what I came up with. It needs some improvements but it is just a design, the one I will use for my project is going to be smaller and more accurate, anyway here is the video of it in action:
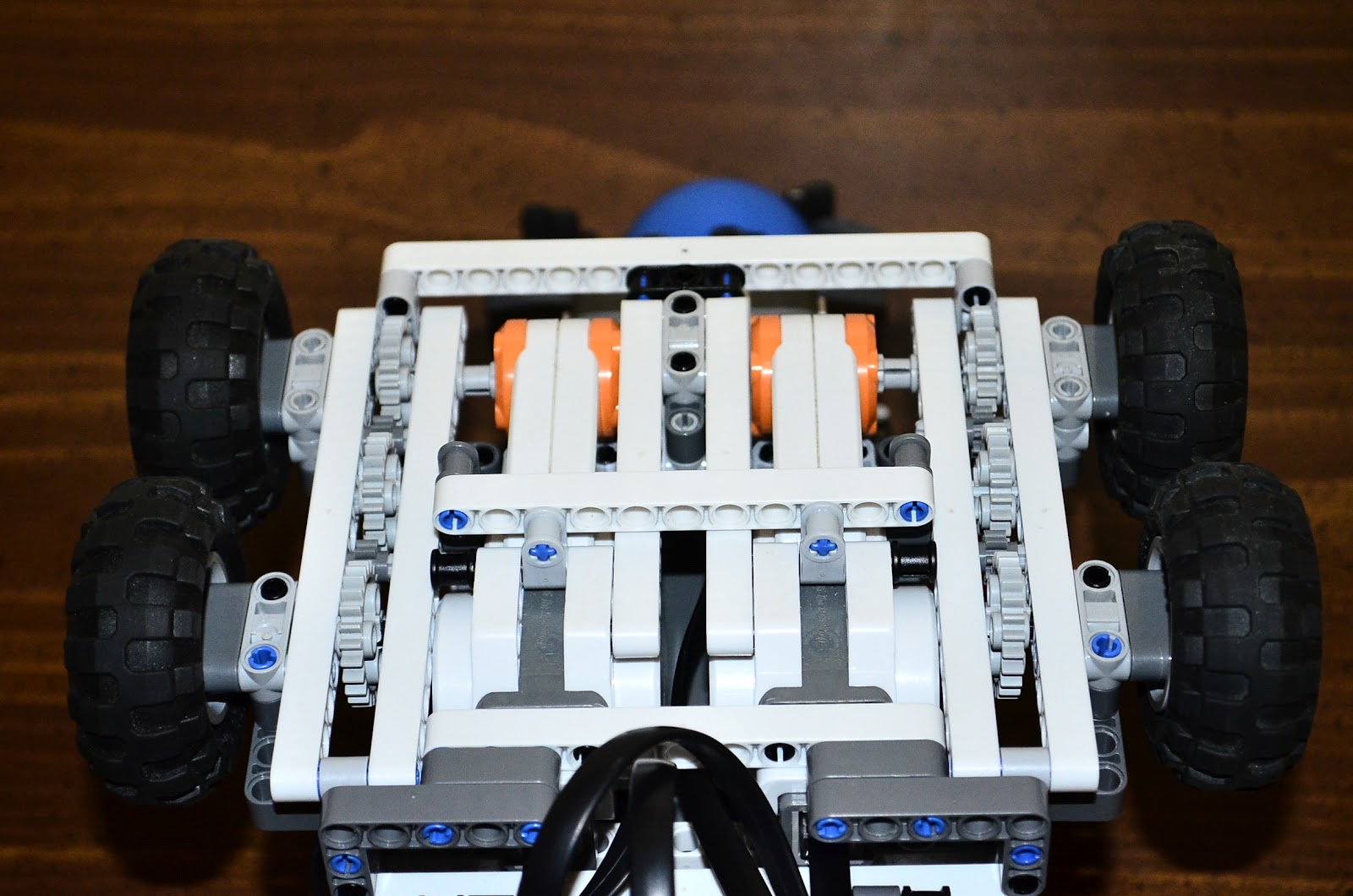
This is my entry into the unofficial NXTLog Mobile Arm Building challenge that me and a couple of other NXTLogger's started. It wasn't as big as I would have liked it to be but due to the amount of parts I have I couldn't make it bigger. Basically it is a moving arm that can drive with two motors and lift and grab with the other giving it an extra dof (degree of freedom). The chassis (pictured below) was built strong to support the skid-steer drive which if not built properly would have bent the axles.
The grabber/lifting mechanism (pictured below) was designed to first grab something then lift it a few inches off the ground. I geared the lifting mechanism down so that it could pick up heavier (approx. 1.5lbs) objects.
I could probably explain how this works in a lot more detail but that is why I made the video. Enjoy!
Stay tuned for some awesome projects coming this summer!
Yes... I arrived at my new home last Thursday and had to unpack and everthing so I have been busy. But I will still be busy for a few more weeks because I have to do school into some of the summer because of the move, but I will have some cool projects coming up hopefully coming up this summer. Also me and my sister have decided to do a little brick-filming this summer. Well I probably won't be able to post or work on any creations (except for the one I have almost finished) until after I finish school.
Here is a quick video of testing out our walking mechanism for our videos. Check out our channel!
First off, I'm not finished with this blog so don't think I'm shutting it down or anything, I just am moving to MN tommorow (I mean't to write about it sooner but I have been super busy with packing and stuff) my dad got a job up there as a pastor so we are moving there tommorow and it will take two or three days to get there. So I won't be posting for maybe a week or two, but there are gonna be some exciting things happening here on my blog this summer (and no I'm not going to just change the design) I will plan it all on the trip and do them hopefully have them up sometime in summer, but since we had to move during the school year I will have to go a few weeks into summer to finish school. Well this was a quick post because its like 10:00 at night and I have to get up early. Sorry this post was sorta messy but I only had a short time to write this.
Awhile ago Xander over at BotBenchposted about Minute Bot a base for the Mindstorm NXT (just like a base for regular LEGO's only for the NXT) I thought that it was something like NXTprograms Five Minute Bot so I never actually read the whole article until recently when someone over at Minute Bot emailed me asking me if I would consider posting their short story about their product on my blog. Here is what they emailed me:
Why is it worth going further?
LEGO is a lot of fun. It became so popular almost anyone knows them. As the brand is developing, LEGO bricks have found a new application in the world of prototypes and science. The recent case of LEGO robots building bones serves as the best example. This creates a need for more durable parts, and more stable constructions.
MinuteBot is a concept of semi-professional robotics made easy. The initial idea is to be able to build a robot within a minute. The broader vision is to develop various elements fully compatible with LEGO but far more durable. Parts are made of industrial components with a strong focus on quality of the design and accuracies of all dimensions. MinuteBot has now two projects: Base and Bearing.
Base is a robust base plate of dimensions 240 x 168 mm, and almost a centimeter thick. It differs from a regular LEGO plate significantly. For starters, instead of studs, the plate has holes, just as if it was supposed to go on top of a LEGO bricks. Secondly, being 8mm thick it is much stiffer, allowing for stable constructions. The product is in its development phase, and thanks to the involvement of LEGO fans, MinuteBot is constantly rethinking the design adding other functionalities.
Funds and support for MinuteBot Base are being collected through crowd sourcing. This project is time limited, and it’s facing the tipping point. Support is crucial to allow for base plate to go into mass production. The design and its possible use may be seen at: http://www.kickstarter.com/projects/37801615/minutebot-base
The other project - MinuteBot Bearing is a real-deal heavy duty steel bearing that can take a load much bigger than a standard LEGO solution. A metal bearing is hidden in a LEGO compatible casing allowing for connecting in two planes. Another feature is its toothed edge which makes it a perfect gearwheel. To earn its way to the market MinuteBot Bearing competes against other creations in a Boca Bearing contest. To view the project and help its way through go to:
MinuteBot is facing a challenge of reaching all LEGO builders that would want to extend their designs by features of these parts. It is the fun of creating, and reliability of the construction that is on stake here.
It looks pretty cool! I just can't beleive LEGO never thought of this. Here is there website: http://www.minutebot.com/ they also have a challenge running where you can win some minutebot bases here: http://www.kickstarter.com/projects/37801615/minutebot-base/posts/217507. I was hoping they would give some details in regards to the price and how big and how small they will make the base, but I will definitely be getting some of these when they come out.



















.jpg)