I have finally finished my MOC! Presenting......... "The Circulator"
When I heard NXTLog was hosting a "crazycontraption" contest I couldn't wait to get started on an entry, but I only had one NXT set so I couldn't make a really big robot, but I started anyway and it turned out great. Okay now on too the details!
Overview picture.
Module 1: When the ball comes down the ramp it falls in between two technic beam liftarms with a 53 degree angle and will spin 90 degrees every 3.5 seconds. Then after 7 seconds it will be pushed of onto a ramp that goes to the next module.
Module 2: This one is based on a popular GBC module. A motor geared down moves a beam with axles through the end in circles to push balls up a 45 degree angle, which pushes them onto another ramp that leads to the last module.
Module 3: This last module is one of the most common modules, all it does is wait until the ultrasonic sensor sees something pass by and waits 1 second to lift the arm up to start the chain all over again.
Conclusion: This has really been a fun project for me to build, and I hope to build an even bigger one when I get my 2.0!
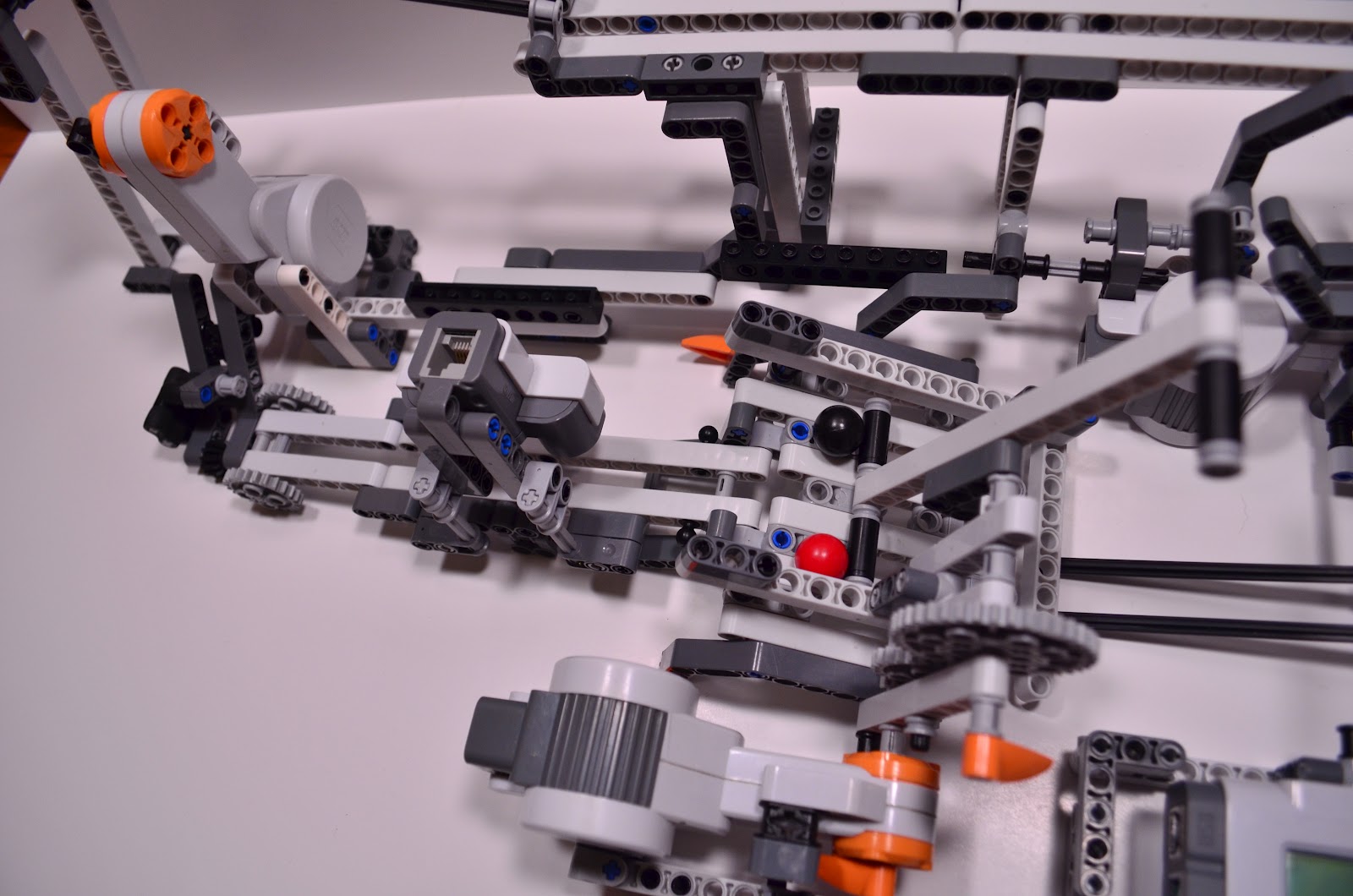
Here is a bird's eye view of "The Circulator"
Video: You know the saying "a picture is worth 1,000 words Well I say this video is worth 10,000 words :P
You said on your you tube video that you could build it with NXT 2.0...sorry but you can't really, i have NXT 2.0 and i couldn't (well i could because i have other parts but using only 2.0) build that because 2.0 has less pieces and very little gears (it only has the double bevel gears, no grey gears.
Michael, I finished your Circulator project build as your youtube video guide, but I meet some problem: After I put the ball down the ramp it comes to he first module. The first module has eight "Technic liftarms" bent at about a 45 degree angle that are attached to the big 40 tooth gear the balls fit right between the two liftarms, the motor turns 90 degrees every 3.5 seconds. And then after 7 seconds it isn't pushed off onto a ramp that leads to the NeXT module.
Could you please help me to fix it, detail information please refer to below video link: http://v.youku.com/v_show/id_XNTEwMjU0Njc2.html
It was hard for me to see exactly what was going on due to the lighting in the video, but if I read your description right then it seems that you may have made a mistake in the building, try rebuilding that part and if the problem persists tell me. Thanks for building it, I hope you can figure out the problem!
I actually checked the video as well, it seems like the part with the "Technic Liftarms" is spinning too fast, you might want to bring the power down some. I have not built this project, therefore I am not entirely sure if that is the problem but from what I could see that is my best guess.
The program is located here: http://www.us.lego.com/en-us/mindstorms/community/robotsteps?projectid=e4ce805e-eb09-459f-a39d-434cc8bc76a6 Just go down to the part of the page with the header: "PROGRAM AND VIDEO".




You said on your you tube video that you could build it with NXT 2.0...sorry but you can't really, i have NXT 2.0 and i couldn't (well i could because i have other parts but using only 2.0) build that because 2.0 has less pieces and very little gears (it only has the double bevel gears, no grey gears.
ReplyDeleteOops.... Thanks for notifying me about that!
DeleteMichael,
ReplyDeleteI finished your Circulator project build as your youtube video guide, but I meet some problem:
After I put the ball down the ramp it comes to he first module. The first module has eight "Technic liftarms" bent at about a 45 degree angle that are attached to the big 40 tooth gear the balls fit right between the two liftarms, the motor turns 90 degrees every 3.5 seconds. And then after 7 seconds it isn't pushed off onto a ramp that leads to the NeXT module.
Could you please help me to fix it, detail information please refer to below video link:
http://v.youku.com/v_show/id_XNTEwMjU0Njc2.html
It was hard for me to see exactly what was going on due to the lighting in the video, but if I read your description right then it seems that you may have made a mistake in the building, try rebuilding that part and if the problem persists tell me. Thanks for building it, I hope you can figure out the problem!
DeleteI actually checked the video as well, it seems like the part with the "Technic Liftarms" is spinning too fast, you might want to bring the power down some. I have not built this project, therefore I am not entirely sure if that is the problem but from what I could see that is my best guess.
DeleteHey try to rebuild this project with nxt 2.0!
ReplyDeleteAt the moment I don't have the 2.0, but I might try rebuilding it using the EV3 when it comes out!
DeleteWhere is the program?
ReplyDeleteThe program is located here: http://www.us.lego.com/en-us/mindstorms/community/robotsteps?projectid=e4ce805e-eb09-459f-a39d-434cc8bc76a6 Just go down to the part of the page with the header: "PROGRAM AND VIDEO".
ReplyDelete